Open Source AR: "iviz" visualisiert Roboter-Daten
Das Karlsruher Institut für Technologie stellt eine Anwendung vor, die Roboter-Daten (ROS) auf mobilen Geräten visualisiert - auch in Augmented Reality.
Mit der AR-App "iviz" soll es Programmierern künftig möglich sein, Bewegungen und erfasste Daten von Robotern auf Smartphones, Tablets oder der Microsoft Hololens 2 zu betrachten. Die Open-Source-Anwendung bietet neben der Visualisierung verschiedener ROS-Daten wie Punktwolken und interaktiver Marker auch eine Steuerung des Roboters über einen virtuellen Joystick in AR.
Mobile Betrachtung von ROS-Daten bislang nur eingeschränkt möglich
ROS steht für Robot Operating System und hat sich in den letzten Jahren zum Standard in der Open-Source-Roboterprogrammierung entwickelt. Das Software-Framework hilft Entwicklern bei der Programmierung von Roboteranwendungen. Es enthält Bibliotheken und Tools zur Lokalisierung, Pfadplanung, Kartierung und Datenvisualisierung.
___STEADY_PAYWALL___Die Visualisierung beschränkt sich bislang auf die Darstellung auf örtlich gebundenen Computern. Mit Tools wie rviz lassen sich dort Daten, die der Roboter erfasst - beispielsweise über Kameras oder Laserscans - als 3D-Grafiken visualisieren.
Es stellt also am Monitor dar, was der Roboter macht, sieht und "denkt". Nutzer, die auf Smartphones oder Tablets sehen wollen, was im System passiert, greifen derzeit auf wenig interaktive Bildschirmspiegelung oder Web-Browser-Versionen von "rviz" zurück. Die in Karlsruhe entwickelte App "iviz" macht die Darstellung ohne Umwege direkt auf mobilen Geräten möglich.
Iviz liefert ROS-Daten auf Hololens, Smartphones und Tablets
Iviz basiert auf der Unity-Engine und wurde von Grund auf für mobile Plattformen wie Android, iOS und UWP entwickelt - samt nativer Unterstützung für Augmented Reality. Sie ist vor allem für die Anwendung auf Smartphones, Tablets und der Microsoft Hololens gedacht. Eine uneingeschränkte Nutzung am Computer mit Linux, Windows oder Mac OS ist ebenfalls möglich.
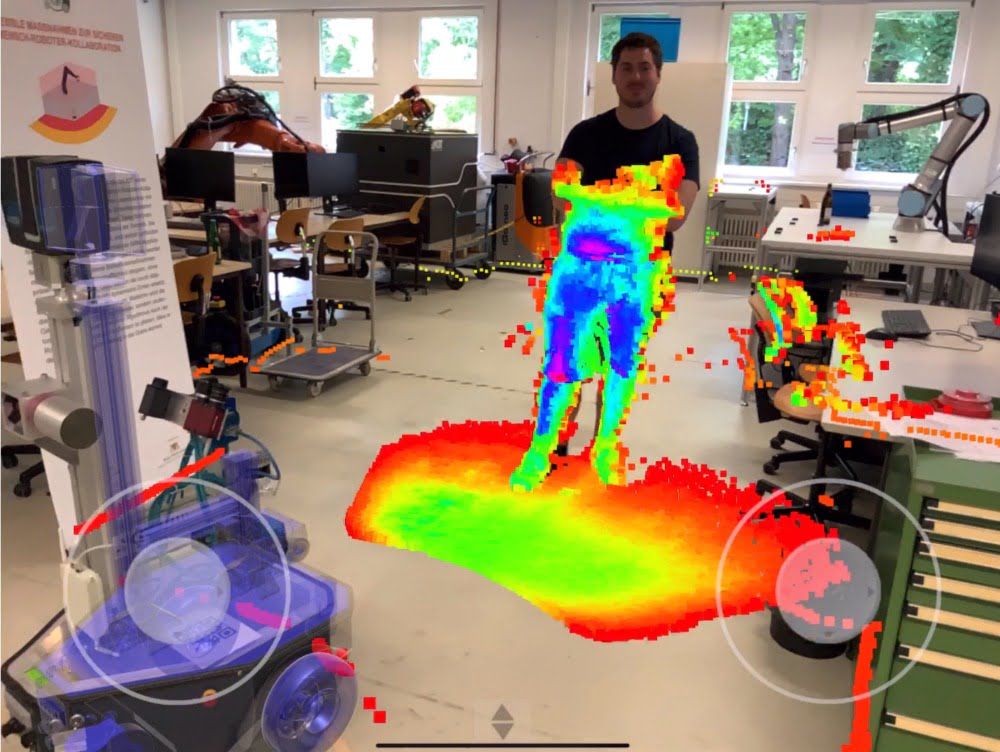
Bei der AR-Visualisierung mit iviz sieht man direkt am Roboter, welche Daten er in der Umgebung wie wahrnimmt. | Bild: KIT
Durch die Kompatibilität mit mobilen Geräten soll iviz vor allem ein Problem lösen: die Bindung des Nutzers an den Aufstellort des PCs. Daten werden nun direkt am Aktionsort des Roboters betrachtet, was wichtige kontextbasierte Informationen liefern kann.
AR-App lässt euch Roboter mit der AR-Brille steuern
Das AR-Modul von iviz lässt euch beispielsweise den Roboter mit interaktiven Markern versehen. Damit lassen sich zu greifende Objekte oder die Positionen der Zielgelenke räumlich darstellen. Mit einem virtuellen Joystick und einer Microsoft Hololens 2 steuert ihr den Roboter in der realen Umgebung und lasst ihn mit virtuellen Objekten interagieren.
 MIXED.de ohne Werbebanner
MIXED.de ohne Werbebanner- Zugriff auf mehr als 9.000 Artikel
- Kündigung jederzeit online möglich
Während der Entwicklung stieß das Team allerdings auch auf Einschränkungen des Systems, beispielsweise bei der Erstellung von Plugins. Zudem seien bestehende ROS-Anwendung nicht ohne weiteres in Unity nutzbar.
Dennoch sei man überzeugt, mit iviz einen nützlichen Beitrag für die ROS-Communitiy geleistet zu haben. Als weiteren Schritt wollen die Forscher iviz für VR-Anwendungen portieren.
Quelle: Forschungspapier
Weiterlesen über Robotik:
- In Japan räumt ein VR-Katzenroboter Supermarktregale ein
- Wandelbots: Roboter programmieren mit Hilfe von SteamVR Tracking
- Boston Dynamics Roboterhund Spot hütet Schafe in Neuseeland
Hinweis: Links auf Online-Shops in Artikeln können sogenannte Affiliate-Links sein. Wenn ihr über diesen Link einkauft, erhält MIXED.de vom Anbieter eine Provision. Für euch verändert sich der Preis nicht.



