VR-Fächercontroller simuliert Haptik durch Formveränderung

Deutsche Forscher entwickelten einen ungewöhnlichen VR-Controller, der mittels mechanisch ausfahrbarer Fächer dynamische Haptik simulieren kann.
"Drag:on" nennen André Zenner und Antonio Krüger vom Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) ihren Prototyp. Weil er wie ein Drache aussieht, der seine Flügel ausbreitet und weil er in dieser Form durch modifizierte Gewichtsverteilung einen größeren Widerstand beim Schwingen erzeugt (engl. Drag = Widerstand).
In einem Youtube-Video (siehe unten) erklären die Forscher die Funktionsweise und den Aufbau des VR-Controllers. Er hat unter anderem zwei Servomotoren verbaut, die die Fächer binnen einer halben Sekunde aufspannen und schließen. Das folgende Video zeigt die unterschiedlichen Formen, die der Controller annehmen kann.
Am unteren Ende des Controllers ist zudem ein Vive Tracker für das räumliche Tracking montiert. Den Controller soll man aus günstigen sowie 3D-gedruckten Bauteilen relativ einfach selbst zusammenbauen können.
Im Video zeigen die Forscher verschiedene Anwendungsszenarien in VR-Apps: Der VR-Controller kann je nach Ausbreitungsgrad der Fächer leichte, mittelschwere und schwere Objekte wie zum Beispiel eine Plastik-, Holz- und Metallschaufel sowie verschiedene Arten von Widerständen simulieren.
Drag:on ist nicht das erste Haptik-Controller-Experiment: Ein spanischer Tüftler entwarf zuvor einen VR-Controller, der ebenfalls mechanische Gewichtsverteilung beherrscht.
 MIXED.de ohne Werbebanner
MIXED.de ohne Werbebanner- Zugriff auf mehr als 9.000 Artikel
- Kündigung jederzeit online möglich
Forscher der Universität Tokio experimentierten mit einer Software, die virtuelle Objekte in kleinere und leicht zu produzierende VR-Controllerdesigns umrechnet, jedoch ohne mechanische Teile.
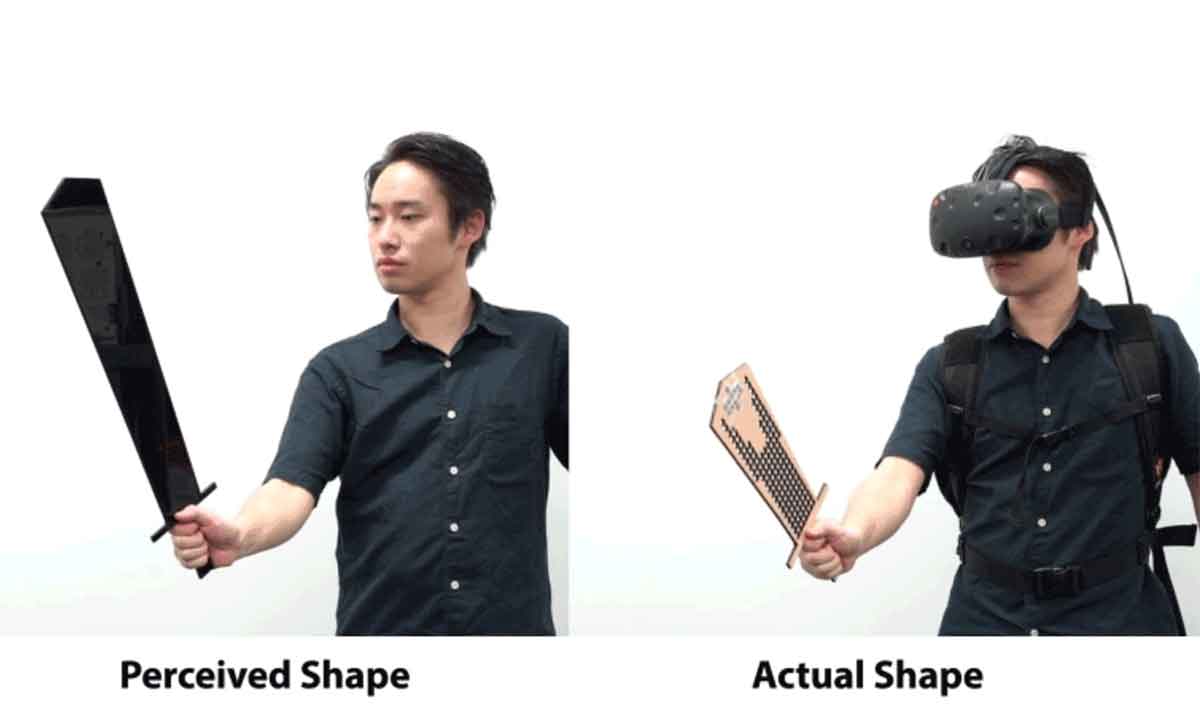
Programm entwirft VR-Controller, die größere Objekte simulieren
Und dann wäre da noch Edward mit den VR-Händen.
Titelbild: André Zenner, Antonio Krüger (DFKI)
Weiterlesen über VR-Controller:
- Quetschen und kneten: Microsoft stellt Haptik-VR-Controller vor
- Tactical Haptics: Haptik-VR-Controller sind reif für die Produktion
- Oculus Quest: Bastler baut coolen Lichtschwert-Controller für Star Wars
Hinweis: Links auf Online-Shops in Artikeln können sogenannte Affiliate-Links sein. Wenn ihr über diesen Link einkauft, erhält MIXED.de vom Anbieter eine Provision. Für euch verändert sich der Preis nicht.




