Virtual Reality: Roboter gibt haptisches Feedback und leistet Widerstand
Wie kann man in Virtual Reality haptisches Feedback simulieren? Beispielsweise mit einem 25.000 US-Dollar teuren Roboter, der aktiv Widerstand leistet.
Bislang stimulieren VR-Technologien in erster Linie das Sehen und Hören. Fast völlig außen vor ist die Haptik, also das Gefühl, dass man einen virtuellen Gegenstand wirklich berührt. Das führt dazu, dass virtuelle Welten - so überzeugend sie optisch sein mögen - schnell so wirken, als würden sie komplett aus Luft bestehen.
Entwickler können diesem Eindruck zwar mit einigen Programmiertricks und gut gewählten Soundeffekten entgegensteuern. Aber wirklich haptisch wird die virtuelle Umgebung erst, wenn realer Widerstand vorhanden ist. Das funktioniert beispielsweise bei virtuellen Rennsport-Simulationen mit einem Lenkrad-Controller oder Mapped-Reality-Umgebungen wie in der VR-Spielhalle "The Void" sehr gut. Hier werden virtuelle und reale Welt so übereinandergelegt, dass man Gegenstände in Virtual Reality nicht nur sehen, sondern auch berühren kann.
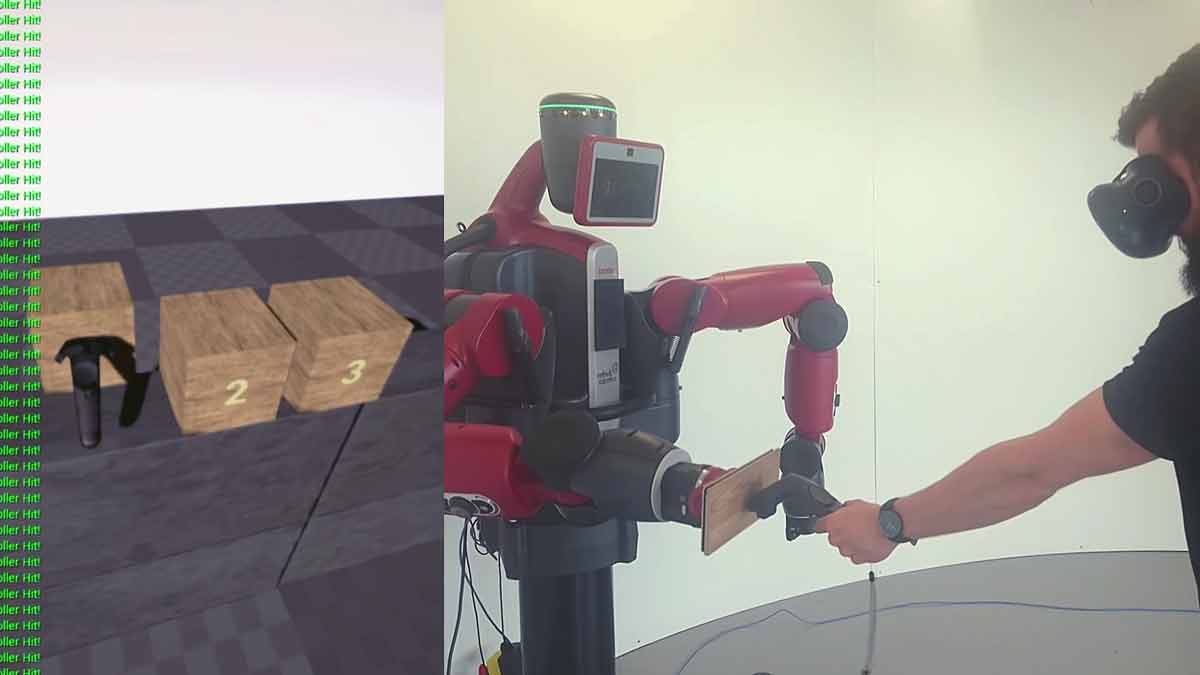
___STEADY_PAYWALL___Einen ähnlichen und recht innovativen Lösungsansatz präsentiert Scott Devine, wissenschaftlicher Mitarbeiter an der Universität Belfast im Bereich Elektrotechnik. Er zweckentfremdet einen herkömmlichen Baxter Arbeitsroboter, um haptisches Feedback in Virtual Reality mit HTC Vive zu simulieren. Das Konzept nennt er "HapticVive".
Dem Allzweckroboter hat Devine beigebracht, passend zu einem virtuellen Ereignis realen Widerstand zu leisten. Er demonstriert das anhand von drei unterschiedlich schweren virtuellen Holzklötzchen, die er in einer VR-Umgebung von einem Vorsprung stoßen möchte. Der Roboter hält ein Stück Holz entgegen und drückt dieses passend zum virtuellen Gewicht gegen Levines 3D-Controller. Der muss in der virtuellen Welt reale Kraft aufbringen, um den Widerstand des Roboters zu überwinden.
 MIXED.de ohne Werbebanner
MIXED.de ohne Werbebanner- Zugriff auf mehr als 9.000 Artikel
- Kündigung jederzeit online möglich
Zu teuer und sperrig für den Heimgebrauch
Das System hat leider noch den ein oder anderen Haken. Ein Daxter-Roboter kostet mindestens 25.000 US-Dollar und ist fürs Wohnzimmer deutlich zu sperrig. Noch dazu bräuchte man mindestens vier dieser Elektro-Kollegen, um bei 360-Anwendungen in jede Richtung Haptik simulieren zu können. Eine Lösung für das Haptik-Problem ist der Roboter-Widerstand also vorerst nicht, aber zumindest ist es ein interessantes Konzept.
Deutlich eher wohnzimmertauglich ist ein neues Experiment von Oculus VR, bei dem elektromagnetische Wellen eingesetzt werden, um Haptik zu simulieren. Allerdings funktioniert das bislang nur in 2D. Das Problem der fehlenden Haptik in Virtual Reality dürfte Ingenieure und Wissenschaftler noch eine ganze Weile beschäftigen.
Hinweis: Links auf Online-Shops in Artikeln können sogenannte Affiliate-Links sein. Wenn ihr über diesen Link einkauft, erhält MIXED.de vom Anbieter eine Provision. Für euch verändert sich der Preis nicht.




