Eine komische Hand und ein klappriges Roboterhündchen sollen die Roboterforschung beschleunigen, wenn es nach Google geht.
Roboter, die in virtuellen Umgebungen trainiert werden, müssen irgendwann den Schritt in die echte Welt wagen. Dabei zeigt sich immer wieder, dass sich Erfolge im virtuellen Training nicht eins zu eins auf die Realität übertragen lassen. Forscher bezeichnen diesen Effekt als „Realitätslücke“.
Eine mögliche Lösung ist es, die trainierten Roboter-KIs erst in kontrollierten, zunehmend komplexeren Umgebungen weiter zu trainieren und zu testen. Alternativ lassen sich die Aufgaben auch direkt mit echten Robotern trainieren – etwa Jenga spielen – das ist genauer, allerdings auch langwierig, da die Realität nicht so leicht modifiziert und vorgespult werden kann wie eine Computersimulation.
Hohe Kosten für Roboterhardware verhindern schnelles Prototyping
In beiden Fällen gibt es jedoch ein Problem: die Kosten. Aktuelle Trainingsumgebungen oder Benchmarks, die die Leistung trainierter Systeme testen sollen, nutzen oft zehntausende US-Dollar teure Hardware aus der Industrie.
Google stellt nun eine Testumgebung vor, die günstige Roboter-Hardware mit Software vereint. „Robotics Benchmark for Learning with Low-Cost Robots” (ROBEL) ist eine Open-Source-Plattform, die schnelles Lernen und Experimentieren mit Robotern fördern soll.
ROBEL setzt dafür auf D’Claw und D’Kitty, zwei verhältnismäßig günstige und robuste Roboter. Die werden von Tossen Robotics für ROBEL gebaut. D’Claw ist eine Roboterhand mit drei Fingern, D’Kitty ein vierbeiniger Robotertorso.
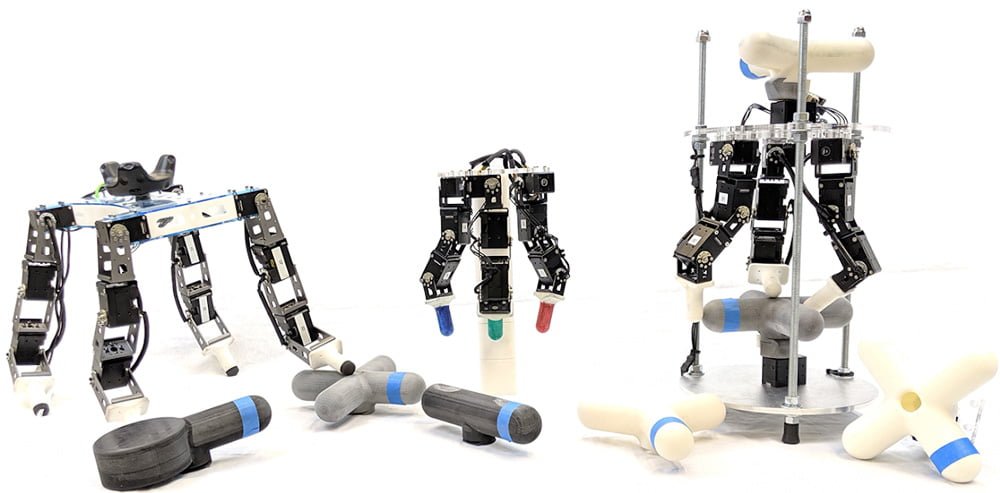
Beide Roboter sind modular, robust und leicht zu reparieren. So können sie kostengünstig in der echten Welt trainiert und bei Bedarf mit Trainingsdaten aus einer Simulation erweitert werden. Dafür ist ROBEL mit der OpenAI Softwareumgebung „Gym“ kompatibel, mit der die Roboter in virtuellen Umgebungen trainiert werden können.
Drehen, Schrauben, Laufen
Doch ein Benchmark ist kein Benchmark ohne Benchmark. Die ROBEL-Plattform ist daher auf gezielte Leistungstests zu bestimmten nützlichen Handlungen ausgelegt.
D’Claw ist auf Tätigkeiten wie Drehen, Schrauben oder Ziehen spezialisiert. Durch die geringeren Kosten sinkt die Hürde, mehrere Roboterhände parallel zu betreiben, um schneller zu lernen.

D’Kitty erinnert ein wenig an die Budget-Variante des Roboterhundes Spot und ist auf Stehen, Laufen, Navigieren oder Schieben spezialisiert. Der Roboter navigiert durch schweres Gelände oder schiebt eine Box umher.
[one_third]
[/one_third]
[one_third]
[/one_third]
[one_third_last]
[/one_third_last]
ROBEL soll Ende Oktober in Osaka auf der Konferenz für Robot Learning (CoRL) ausführlich vorgestellt werden.
Quelle: Google
Weiterlesen über Künstliche Intelligenz:
![Boston Dynamics: Spot Roboterhund im Praxistest [VIDEO]](https://the-decoder.de/wp-content/uploads/2022/08/boston_dynamics_roboter_spot_test-375x211.jpg)