In Spielen wie Go oder Starcraft soll Künstliche Intelligenz überlegene strategische und planerische Fähigkeiten unter Beweis stellen. Beim Türmchenspiel Jenga geht's jetzt um das Fingerspitzengefühl.
Bei Jenga müssen Spieler Holzklötzchen aus einem Turm entfernen und oben wieder drauflegen. Mit jedem entfernten Klötzchen wird der Turm instabiler - bis er irgendwann zusammenbricht. Die Kunst ist, nicht der Spieler zu sein, dem dieses Malheur unterläuft.
Wer Jenga schon mal gespielt hat, weiß: das braucht Fingerspitzengefühl. Mit viel Bedacht muss man an den Klötzchen ziehen, sie gefühlvoll bewegen und daran rütteln, um die tragenden von beweglichen zu unterscheiden. Keine leichte Aufgabe für einen Roboter, sollte man meinen. Bis jetzt.
KI mit Fingerspitzengefühl
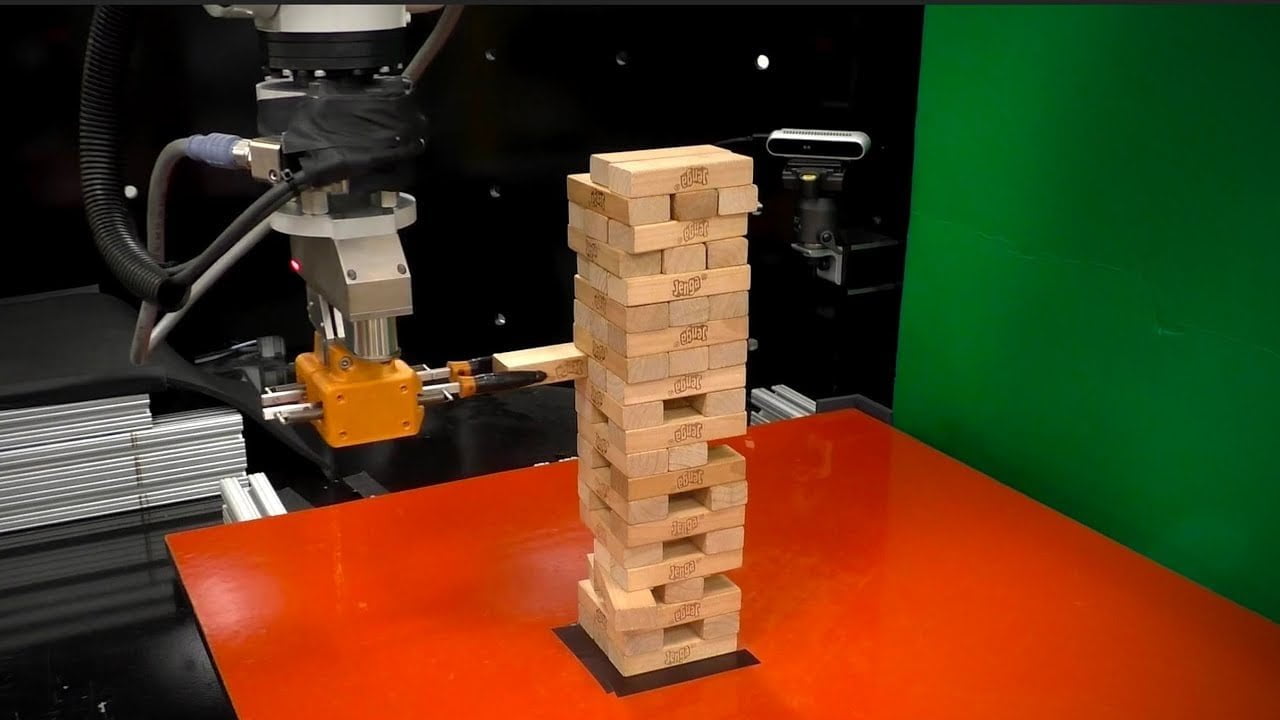
Die Besonderheit am KI-gesteuerten Jenga-Roboter ist, dass die Forscher des Massachusetts Institute of Technology (MIT) vorab auf eine Simulation verzichteten. Normalerweise können KI-Agenten ihre Aufgabe zuerst in einer Computerumgebung in hohem Tempo trainieren, bevor sie dann in einen Roboter versetzt werden und diesen steuern wie den simulierten Roboter zuvor. Beim Jenga-Spiel sei die korrekte Physik-Simulation jedoch zu komplex, so die beteiligten Forscher.
Daher trainierten sie das neuronale Netz von Anfang an am realen Objekt. Um das Lernverfahren zu beschleunigen, ließen sie die KI einmal gemachte Erfahrungen gruppieren.
So bildete sie grundlegende Vorstellungen über die Klötzchen und mögliche Ergebnisse, wenn sie entfernt werden: "leicht zu bewegen", "schwer zu bewegen", "nicht zu bewegen" - also ein rudimentäres Verständnis von physikalischen Ursache-Wirkungs-Zusammenhängen, das informierte Vermutungen über zukünftige Entwicklungen zulässt. Haptische Informationen über die Klötzchen sammelte die KI mittels Kameraüberwachung und druckempfindlichen Sensoren an den Robotergabeln.
Dieses Vorgehen erwies sich als deutlich weniger aufwendig, als jedes mögliche Turmbauszenario zu simulieren. Nur etwa 300 Trainingsdurchläufe brauchte die KI laut der MIT-Forscher, um Jenga auf menschlichem Niveau zu beherrschen: Bis zu 21 Steine kann sie erfolgreich entfernen, bevor der Turm in sich zusammenbricht.
Herkömmliche maschinelle Lernverfahren in einer Computersimulation ohne reale Haptik brauchten anhand derselben Trainingsinformationen deutlich mehr Versuche, um Jenga zu lernen. Das zeigten anschließende Tests.
"Es gibt viele Aufgaben, die wir mit unseren Händen erledigen, bei denen wir anhand von Berührung und Kräften merken, ob wir sie richtig machen", sagt der am Projekt beteiligte Wissenschaftler Alberto Rodriguez.

Das neu entwickelte Lernverfahren, so heißt es in der wissenschaftlichen Publikation, setzt genau an diesem Punkt an: Roboter sollen sehen, fühlen, handeln. In dieser Reihenfolge. Bei Jenga funktioniert es schon.