Waymo macht einen riesigen Bewegungsdatensatz für autonomes Fahren frei verfügbar und ruft gleichzeitig einen Entwickler-Wettbewerb aus.
Waymo wurde 2016 vom Alphabet-Konzern gegründet, um die Arbeiten am autonom fahrenden Google Driverless Car fortzusetzen. Schon ein Jahr später stellte das Unternehmen die Entwicklung eines eigenen Robo-Autos ein und konzentrierte sich fortan ausschließlich auf die Technologie dahinter.
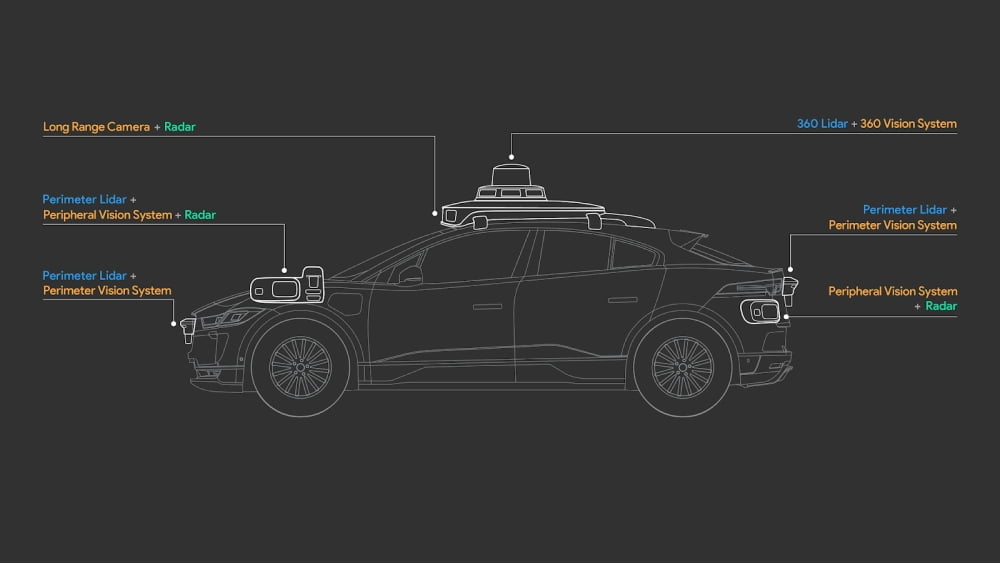
Das autonome Fahrsystem Waymo Driver 5 wurde auf der CES 2021 mit einem Innovation Award ausgezeichnet. Es besteht aus mehreren Kamera-Systemen und Radarsensoren. Zudem setzt Waymo auf Lidar-Technik, um die Umgebung möglichst weitläufig und genau zu erfassen. Doch die Wahrnehmung von Hindernissen, Warnschildern und Verkehrsteilnehmern allein reicht nicht aus, um autonomes Fahren sicherzumachen.
Die zugrunde liegende Künstliche Intelligenz muss auch das Verhalten anderer Verkehrsteilnehmer vorhersehen können. Dazu füttern Entwickler ihre Systeme mit Unmengen an Verkehrsdaten, um sie durch maschinelles Lernen zu verbessern. Mit einer Erweiterung seines Open Datasets veröffentlicht Waymo nun den nach eigenen Angaben größten interaktiven Bewegungsdatensatz für die Forschung im Bereich der Verhaltens- und Bewegungsvorhersage für autonomes Fahren.
Waymo Open Dataset: Neuer Datensatz umfasst über 500 Stunden
Waymos Bewegungsdatensatz umfasst insgesamt 570 Stunden aufbereitete Verkehrsaufnahmen. Er besteht aus Objekt-Trajektorien, also den Bewegungspfaden der verschiedenen Verkehrsteilnehmer und entsprechendem 3D-Kartenmaterial für über 100.000 Segmente.
Jedes davon dauert mit zwanzig Sekunden lange genug, um Modelle zu trainieren, die komplexe Verhaltensweisen erfassen können. Alle Daten sollen interessante Interaktionen aufweisen und über den normalen Verkehrsalltag hinaus gehen. Damit eignen sie sich, um ein autonomes Fahrsystem auf besondere Verkehrssituationen vorzubereiten.
Die Bewegungsdaten wurden auf einer Vielzahl von Straßentypen und Fahrbedingungen zu jeder Tages- und Nachtzeit erfasst. Die Strecken umfassen die städtischen Bereiche von Los Angeles, Mountain View, San Francisco, Seattle, Detroit und Phoenix. Im Bundesstaat Arizona ist auch Waymos Taxi-Service beheimatet. Erst kürzlich veröffentlichte das Unternehmen eine Studie, die zeigen soll, wie autonomes Fahren tödliche Unfälle verhindern würde.
Dazu ließ Waymo Rekonstruktionen realer Unfälle anfertigen und simulierte, wie sich der Waymo Driver in der jeweiligen Situation verhalten hätte. Die Ergebnisse zeigten, dass das KI-System in beinahe allen Fällen die Kollisionen verhindert oder zumindest deutlich abgemildert hätte. Ausnahmen stellten lediglich Auffahrunfälle dar, bei denen das Heck des autonomen Fahrzeugs gerammt wurde.
Waymo gibt an, die veröffentlichten Bewegungsdatensätze so aufbereitet zu haben, dass sie interessante Beispiele für Interaktionen mit verschiedenen Verkehrsteilnehmern aufweisen. Darunter Radfahrer und Fahrzeuge, die sich Fahrbahnen teilen, Autos, die über belebte Kreuzungen rasen oder auf Gehwegen versammelte Fußgängergruppen.
Wettbewerb soll andere Entwickler motivieren
In einem dazugehörigen Forschungspapier beschreibt Waymo detailliert, wie die Daten erhoben und aufbereitet wurden. Das Unternehmen stellt das Open Dataset auf seiner Webseite zum freien Download zur Verfügung. Zudem gibt es ein Tutorial auf Github.
Im Rahmen der Datensatz-Veröffentlichung veranstaltet Waymo auch einen Wettbewerb. Damit will das Unternehmen Forscher und Entwickler ermutigen, ihre Wahrnehmungs- und Vorhersagemodelle zu verbessern. Insgesamt vier Herausforderungen aus den Bereichen Bewegungs- und Interaktionsvorhersage sowie Echtzeit- 3D- und 2D-Erfassung müssen die Systeme der Teilnehmer meistern.
Jede Herausforderung ist mit 15.000 US-Dollar für den Sieger, 5.000 US-Dollar für den Zweitplatzierten und 2.000 US-Dollar für den dritten Platz dotiert. Die Gewinner werden außerdem eingeladen, ihre Arbeit auf Waymos Workshop für autonomes Fahren beim diesjährigen CVPR-Event vorzustellen.
Titelbild & Quelle: Waymo